Table of Contents
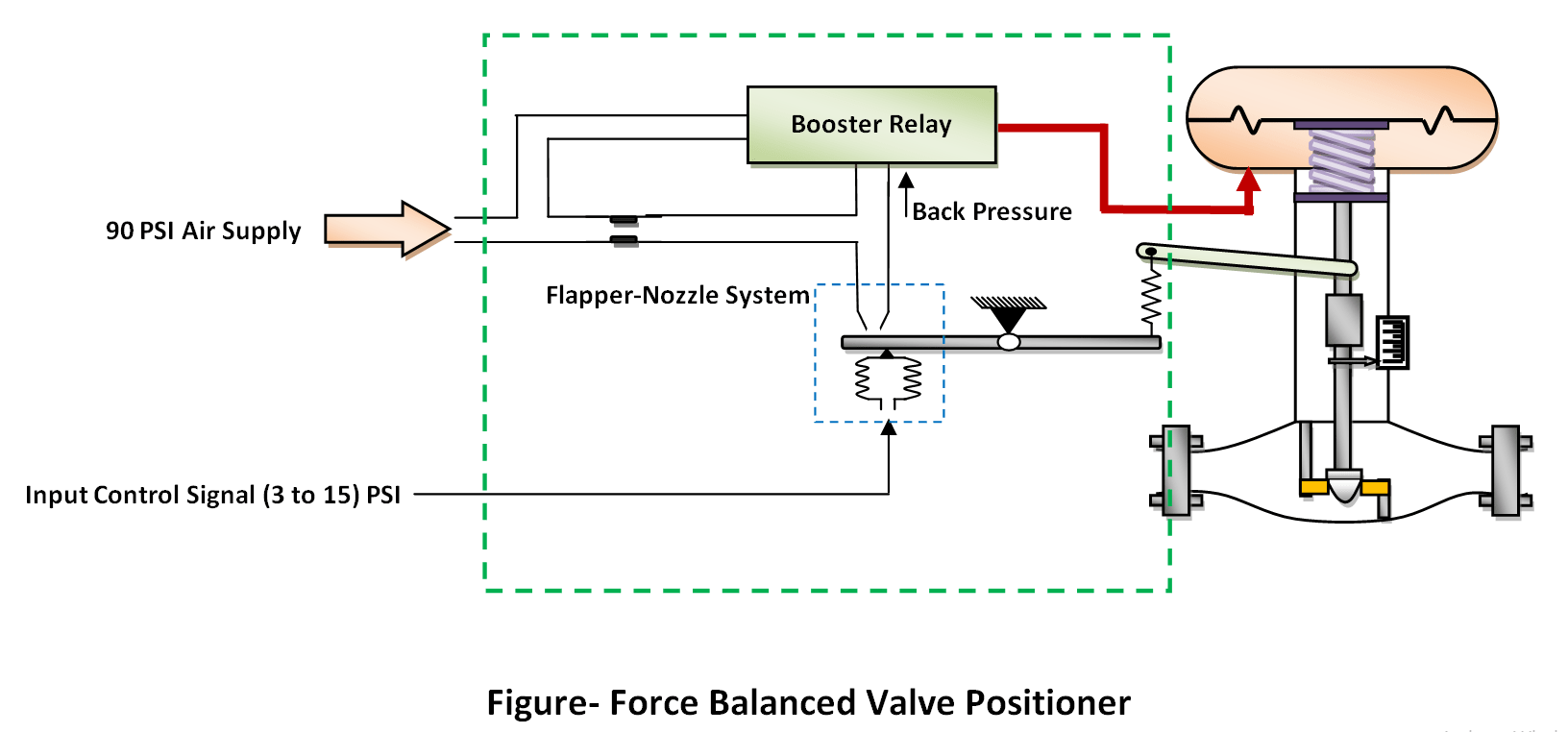
A pneumatic control valve positioner is a device that ensures accurate positioning of a control valve in response to a control signal. It operates by receiving an input signal from a controller and adjusting the position of the valve accordingly. The following are the main principles behind the operation of a pneumatic control valve positioner:
Feedback Control Principle
The positioner receives a feedback signal from the valve stem, which is used to adjust the valve position to match the desired setpoint. This feedback signal can be obtained either through a mechanical linkage or through an electronic sensor.
Pneumatic Amplification Principle
The positioner uses a pneumatic amplifier to convert the small input signal from the controller into a larger output signal that can be used to move the valve. The pneumatic amplifier works by increasing the pressure of the air supplied to the actuator, which in turn increases the force applied to the valve stem.
Direct Acting Principle
In a direct acting positioner, the output pressure of the positioner increases as the input signal from the controller increases. This causes the valve to move in the same direction as the input signal. Conversely, in a reverse acting positioner, the output pressure decreases as the input signal increases, causing the valve to move in the opposite direction.
Split Range Principle
In a split range positioner, the input signal from the controller is split into two separate signals, which are used to control two different valves or actuators. This allows for more precise control over a wide range of process conditions.
Overall, a pneumatic control valve positioner operates on the principles of feedback control, pneumatic amplification, and direct or reverse acting control. By ensuring accurate positioning of the control valve, it helps to improve process control and efficiency in a variety of industrial applications.
Read Also